【CS130】Midterm Review
0. Overview
0.0. What is OS?
OS is an special layer of Software.
- Provides application SW access to HW resources
- Convenient abstraction of complex HW devices
- Protected access to shared resources
- Security and authentication
- Communication amongst logical entities
0.1. OS’s Basic Behaviors
- Translate programs to processes
- Deals with context switch
- Scheduling, Protection
- I/O
- Loading
0.2. OS Boot
- Initialization at a fixed memory location
- Bootstrap Loader
- Loads Kernel
0.3. Three Roles Of OS
OS is an illusionist
- Provide clean, easy-to-use abstractions of physical resources
- Infinite memory, dedicated(专心的,一致的) machine
- Higher level objects: FIles, users, messages……
- Masking Limitations, Virtualization
OS is a Referee
- Manage protection, isolation, and sharing of resources
OS is a glue
- Storage, Networking
- Sharing, authorization
1. Four Basic OS Concepts
1.0. Overview
Abstractions of Underlying HW
- Processor → Thread
- Memory → Address Space
- Disks, SSDs,… → Files
- Networks → Sockets
- Machines → Processes
Basic OS Concepts
- Thread
- Execution Context
- Fully Describes Program State
- PC, Regs, Execution Flags, Stack…
- Address Space
- Set of memory address accessible to program
- May be distinct from memory space of physical machine ( in which case programs operate in a virtual machine )
- Process
- An instance of Running Program
- Protected Address Space + One / More Threads
- Dual-Mode Operation / Protection
- Only the “System” can access certain resources
- Combined with translation, isolates programs from each other, and isolates OS from programs.
1.1. Thread
Thread is single unique execution context.
- A thread is suspended(挂起,即不执行)when its state is not loaded (resident,常驻 ) into the processor.
- Resident: Register hold the root state of the thread. Include the PC Regs and currently executing instruction.
- Illusion of Multiple Processors
- Threads are virtual cores!
Thread Control Block(TCB)
- Holds contents of registers when thread is not running
- Contains:
- Execution State: CPU Registers, Pprogram Counter (PC), Pointer to Stack (SP)
- Scheduling info: State, Priority, CPU time
- Various Pointers (for implementing scheduling queues)
- Pointer to Enclosing Process (PCB)
Super scalar and Hyper threading
- Super scalar processors can execute multiple instructions that are independent.
- Hyper threading duplicates register state to make a second “thread”, allowing more instructions to run.(本质上是通过寄存器的复制来创建额外线程)
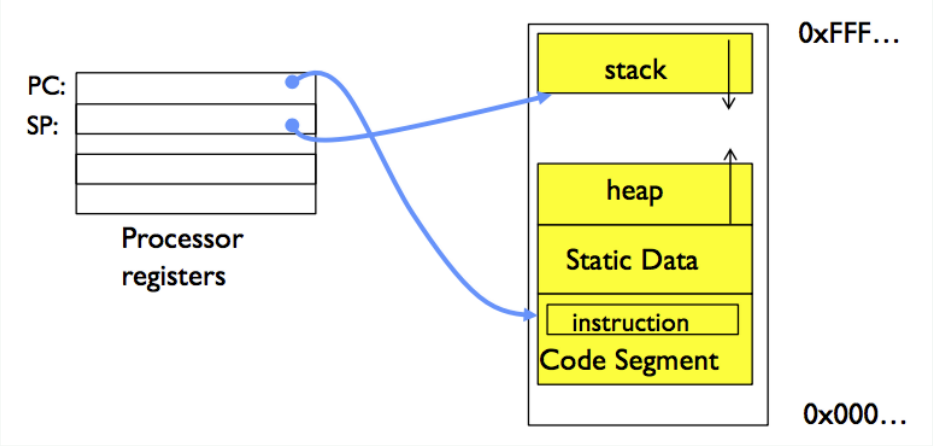
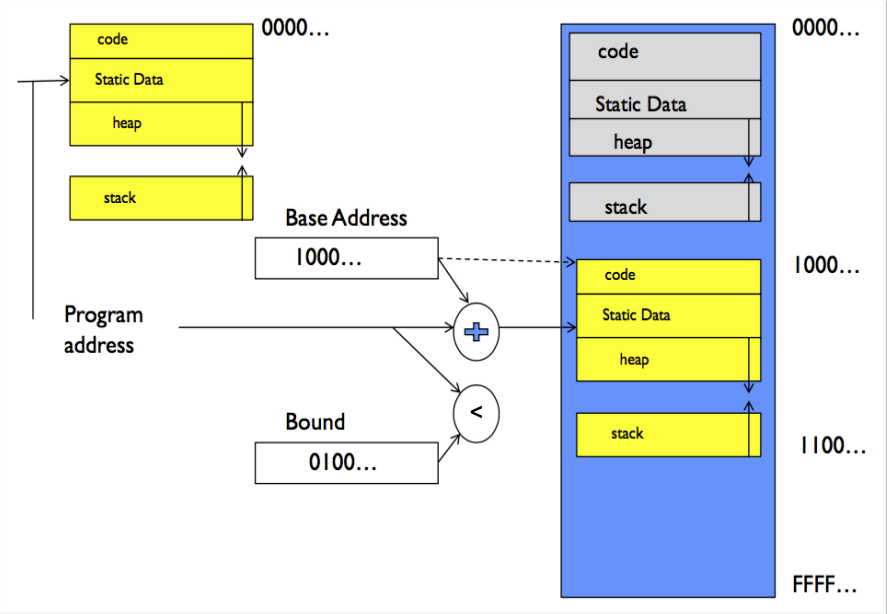
1.2. Address Space
Address space is the set of accessible addresses + state associated with them.
Space Size?
- For 32 Bit: $2^{32} = 4\text{GB}$
- For 64 Bit: $2^{64}\approx 10^{18}\text{Bytes}$
Four Segment:
- Stack
- Heap
- Static Data
- Code.
OS Protection?
- OS must protect itself from user programs
- Reliability, Security, Privacy, Fairness
- OS must protect user programs from one another
Simple Protection: Base & Bound
1.3. Process
Execution environment with Restricted Rights.
Fundamental tradeoff between protection and efficiency
- (Protected) Address Space with One or More Threads
- Owns memory ( Address Space )
- Owns file descriptors, file system context, …
- Encapsulate(封装) one or more threads sharing processes resources
Why Processes ?
- Protected from each other
- OS protected from them
Multi-Threaded Processes
- Threads encapsulate Concurrency
- “Active” component(主动的组件,推动程序向前)
- Address Spaces encapsulate Protection
- “Passive ” part(被动的部分,存储机制的提供者)
- Keeps buggy program from trashing the system
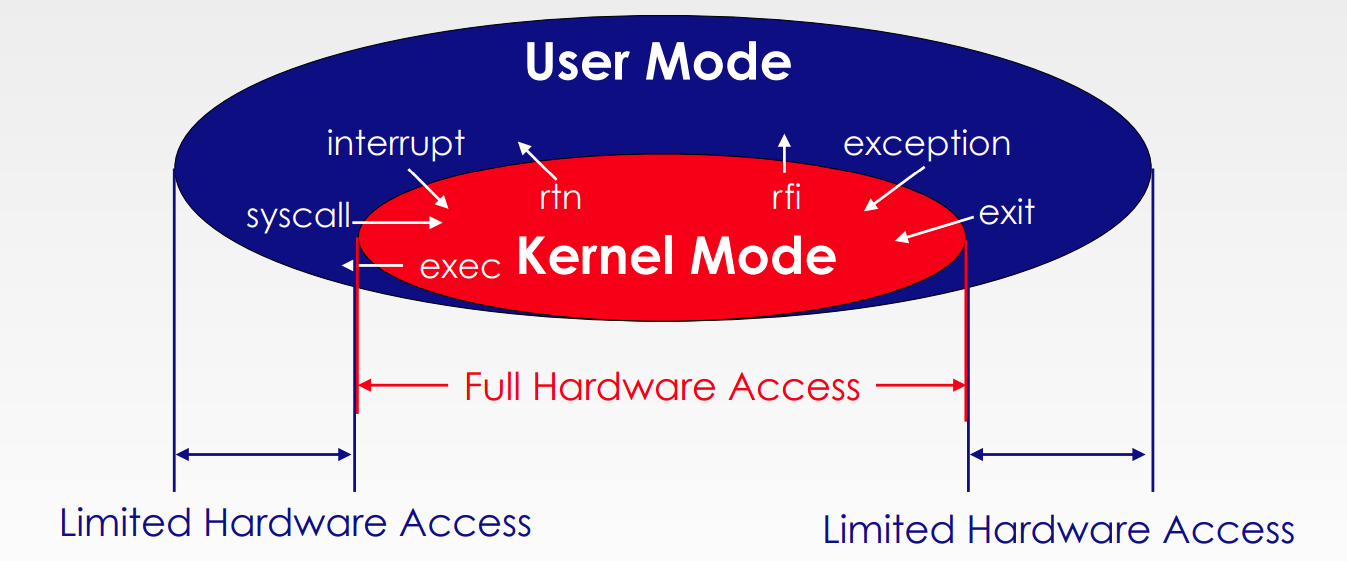
1.4. Dual Mode Operation
- Only the “system” has the ability to access certain resources
- OS and HW protected from user programs
- User programs isolated from one another
- Hardware provides at least two modes ( Kernel Mode and User Mode )
- Need: A bit of state, Certain operations only permitted in system / kernel.
- User → Kernel Transition: Set System Mode, Saves User PC
- Kernel → User Transition: Clear System Mode, Restores Appropriate User PC.
2. Process Management
Process: OS abstraction of what is needed to run a single program.
2.0. Process Control Block ( Compare with TCB! )
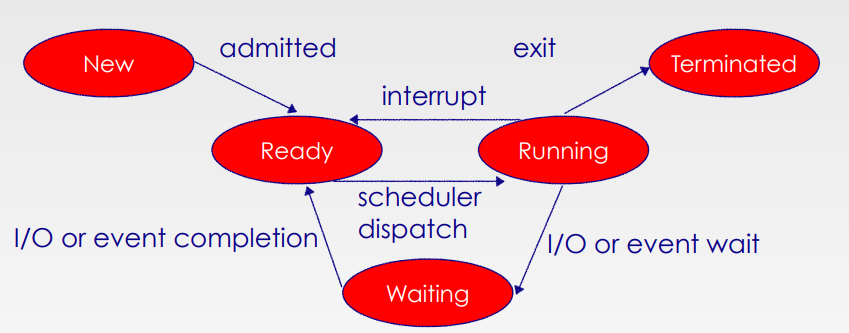
- Process Status (running, ready, blocked, …)
- Register state (when not ready)
- Process ID (PID), User, Executable, Priority, …
- Execution time, …
- Memory space, translation, …
- Kernel Scheduler maintains a data structure containing the PCBs
In Context switch, we save the current process’s state to it’s PCB, and reload another process’s state.
2.1. System Call
- Vector through well-defined syscall entry points
- “定义良好的 System Call 入口“
- Table mapping system call number to handle
- Locate argunments
- In registers or on user stack
- Copy arguments
- From user memory into kernel memory
- Protect kernel from malicious code evading checked
- Validate arguments
- Protect kernel from errors in user code
- Copy results back
- Into user memory
There are also Hardware Support for Interrupt Control !
- Not be visible to the user process
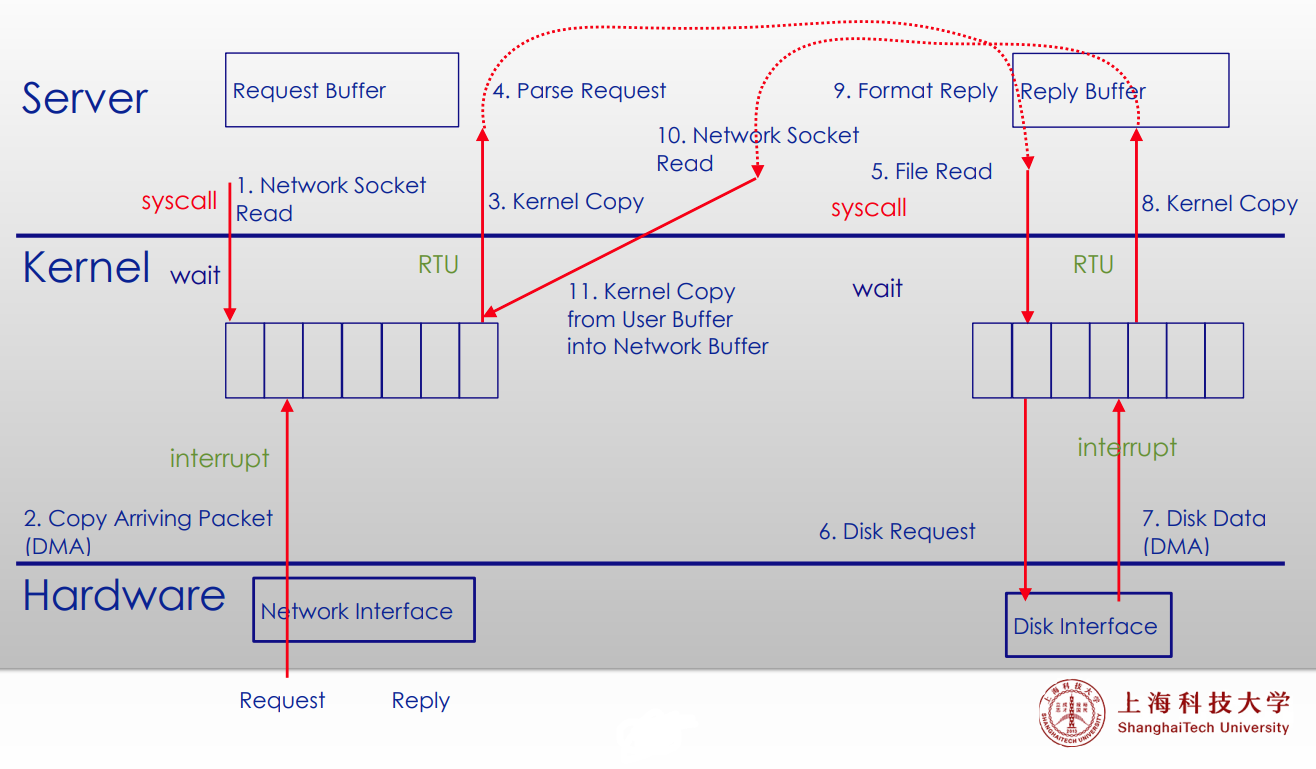
2.2. Web Server
2.3. Process Creation
Fork
- Return > 0
- Running in Parent Process
- Return value is PID of new child!
- Return = 0
- Running in new Child Process
- Return < 0
- Error
All state of original process is duplicated in both Parent and Child process
值得注意的是,
fork()后面的所有代码都会被子线程执行
考点经常结合逻辑运算符的短路特性。
e.g.1.if(fork() || fork()) fork();就会产生 5 个子线程。
e.g.2.fork() && fork() || fork()会产生 4 个子线程
Unix Process Management
fork- Create a copy of current process, and start it running
exec- Change the program being run by the current process
- 在 Fork 之后使用,替换 Process 的 Memory Space
wait- Wait for a process to finish
- Return status information and the pid of terminated process:
pid = wait(&status);
kill- Send a signal to another process
exit- Process asks OS to delete it
- return status data from child to parent
abort- Process terminate the execution of children process
2.4. Threads
Motivation: OS need to be able to handle multiple things at once.
Thread States
- State shared by all thread in process / address space
- Content of memory ( Global Variables, Heap )
- I / O State ( File Descriptors, Network connection, … )
- State “Private” to each thread
- Kept in TCB
- CPU Registers ( Include PC! )
- Execution stack
- Parameters, Temporary Variables
- Return PCs are kept while called procedures are executing.
Actual Thread Operations
thread_fork(func, args)- Create a new thread to run
func(args).
- Create a new thread to run
thread_yield()- Relinquish processor voluntarily.(自愿放弃处理器的使用权或控制权。)
thread_join(thread)- In parent, wait for forked thread to exit, then return
thread_exit()- Quit thread and clean up, wake up joiner if any.
- pThreads
The core of Concurrency
That’s the Dispatch(调度程序、调度器) Loop!
1 | |
Running the thread:
- Load it’s state (Reg, PC, Stack pt) into CPU.
- Load enviroment (VM,…)
- Jump to the PC
Events: Let Dispatcherget control back
- Internal event: Thread returns control voluntarily
- Blocking on I/O
- Waiting on a “signal” frin itger thread
- Thread executes a
yield()
- External Events: Thread get preempted
- Interrupts: signals from HW or SW that stop the running code and jump to kernel
- Timer: like an alarm clock that goes off every some may milliseconds
2.5. Comparison
| Same Process | Diff. Process | |
|---|---|---|
| Switch Overhead | Low | High |
| Protection Overhead | Low | High |
| Sharing Overhead | Low | High |
| Same core | Diff. Core | |
|---|---|---|
| Switch Overhead | Low | High |
| Protection Overhead | Low | High |
| Sharing Overhead | Low | High |
2.6. Multi-Thread Processes
- PCB points to multiple TCBs
Multi-Threading Models
- Many-to-One
- User-level threads mapped to single kernel thread
- One thread blocking causes all to block
- One-to-One
- Each User-level thread maps to kernel thread
- Creating a user-level thread creates a kernel thread
- More concurrency, more overhead
- Many-to-Many
- Allows many user-level threads to be mapped to many kernel threads
- Allow OS to create a sufficient number of kernel threads.
3. Synchronization
3.1. Definitions
Atomic Operations
An operation that always run to completion or not at all
- Indivisible: Cannot be stopped in the middle and state cannot bemodified by someone else in the middle.
- Fundamental building block: If no atomic operations, then have no way for threads to work together.
Synchronization
Using atomic operations to ensure cooperation between threads
Mutual Exclusion
Ensuring that only one thread does a particular thing at a time.
Critical Section
Piece of code that only one thread can execute at once.
Lock
Prevents someone from doing something.
- Lock before entering critical section and before accessing shared data
- Unlock when leaving, after accessing shared data
- Wait if locked
- Important idea: all synchronization involves waiting
3.2. “Too Much Milk”
Solved with lock:
1 | |
Section of code between
Acquire()andRelease()called a “Critical Section”
Use lock, the critical section is very short !
3.3. Lock
Basic Inplementation
1 | |
1 | |
1 | |
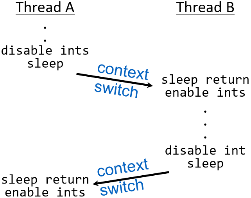
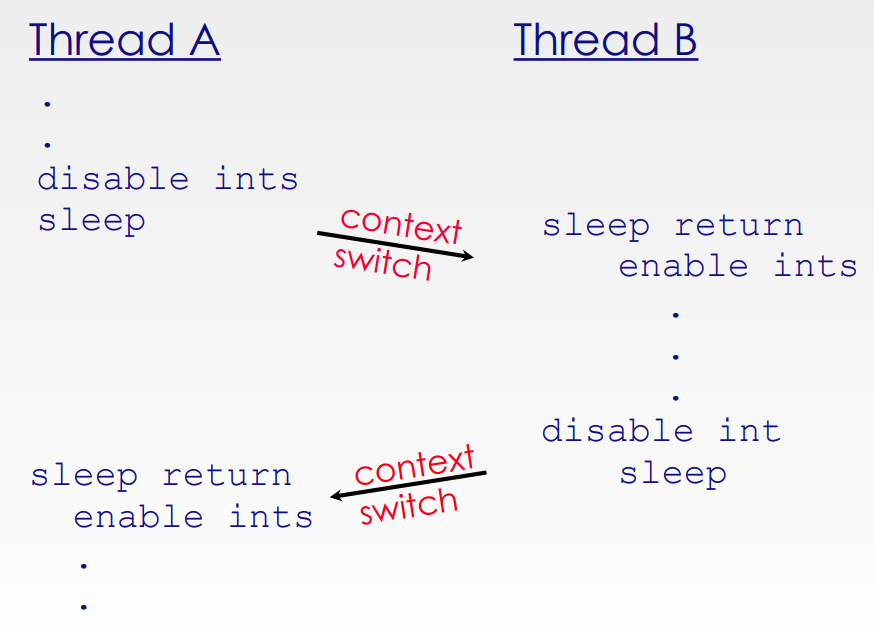
Why do we need to disable interrupts?
- Avoid interruption between checking and setting lock value
- Otherwise two threads could think that they both have lock
When we enable interrupt?
Before
put thread on wait queue;?- Release can check the queue and not wakeup thread
Between
put...andGo to sleep();?- Release puts the thread on the ready queue, but the thread still think it needs to go to sleep
- Misses wakeup and still holds lock ( Calls Deadlock! )
How to solve?
When the sleeping thread wakes up, returns to acquire and re-enable interrupts.
Atomic Read Modify Write Instructions
These instructions read a value and write a new value atomically
1 | |
1 | |
Impelment Lock with test&set
1 | |
1 | |
Busy-Waiting: thread consumes cycles while waiting!
- For multi-processors: every test&set is a write, which makes value ping-pong around in cache (using lots of network BW)
- It will cause Priority Inversion!
Solution: test&test&set (Multi-Processor: Spin Locks)
1 | |
- Solve Multi-processors Problem.
- Still Busy Waiting!
Better Locks with test&set
1 | |
1 | |
1 | |
3.4. Semaphore
Semaphore has a non-negative integer value and supports the following two atomic operations:
P(): Waits for semaphore to become positive, then decrements it by 1.- Also called
wait()
- Also called
V(): Increments the semaphore by 1, waking up a waiting P if any.- Also called
signal()
- Also called
Implementation
1 | |
1 | |
Usage
- Binary Semaphore (Block/Resume Semaphore)
- Int range only between 0 and 1 (with initial value = 1)
- Same as a Mutex Lock.
- Counring Semaphore, for scheduling constrainrs ( with initial value = 0)
- Allow thread 1 to wait for thread 2
Lock vs Semaphore
| Advantage | Disadvantage | Use Case | |
|---|---|---|---|
| Locks | A lock allows only one thread to enter the section or resource that’s locked at a time, simple to use. | Locks can lead to problems like deadlocks if not used carefully. | Locks are more suitable when you need to ensure that only one thread can access a resource at a time, such as writing to a shared source. (Other reasonable answers are acceptable.) |
| Semaphores | Semaphores can control access of multiple threads to one or more resources | Semaphores can be more complex to use correctly compared to locks, and misuse can lead to problems such as deadlocks and starvation. | Semaphores are suitable for Producer and Consumer case where there exists threads producing data and threads consuming data. (Other reasonable answers are acceptable.) |
3.5. Monitors
A lock and zero or more condition variables for managing concurrent access to shared data.
- Lock: Provides Mutual Exclusion to shared data
- Condition Variable: A queue of threads waiting for something inside a critical section
Condition Variables
Allow wait(&lock) , signal() and broadcast() operations.
- Rule: Must hold lock when doing condition variable ops
3.6. Deadlock and Starvation
Overview
Resources
- Serially reusable resources (CPU cycles, memory space, I/O devices, files); Consumable resources (message, buffer of information, interrupts)
Comparision
- Deadlock → Starvation
- Starvation can and, Deadlock can’t end without external intervention
Deadlock
- Two or more processes are waiting indefinitely for an event that can be caused by only of the waiting processes
Starvation
- Indefinite blocking
- A process may never be removed from the semaphore queue in which it’s suspended
Deadlock
- Definitions
- A process is deadlocked if it’s waiting for an event that will never occur
- Conditions:
- Mutual exclusion
- Hold and wait
- No preemption
- Circular wait
- Deadlock Management
- 死锁预防是在系统设计和资源分配阶段采取措施防止死锁的发生,而死锁避免是在运行时动态地检测和避免可能导致死锁的状态。
- Prevention(预防)
- Ensure that at least one of the necessary conditions for deadlock cannot hold.
- Mutual Exclusion
- No issue for sharable resources
- Can not deny this for non-sharable resources
- Hold and wait(确保当一个进程请求资源时,它不持有其他资源。)
- Guarantee that when a process requests a resource, it does not hold other resources
- No Preemption(如果一个持有某些资源的进程请求无法立即分配的另一个资源,该进程将释放当前持有的资源,并将被抢占的资源添加到等待列表中。只有当该进程能够重新获取其原有的资源以及请求的新资源时,才会重新启动。)
- If a process that is holding some resources requests another resource that cannot be immediately allocated to it, the process releases the resources currently being held.
- Preempted resources are added to the list of resources for which the process is waiting
- Process will be restarted only when it can regain its old resources as well as the new
ones that is requesting.
- Circular wait(避免无限的资源申请:对所有资源类型进行全局排序,并要求进程按照递增的枚举顺序请求资源。如果持有类型为N的资源,进程只能请求类型大于N的资源。)
- Impose a total ordering of all resource types
- Require that processes request resources in increasing order of enumeration
- If a resource of type N is held, process can only request resources of types > N
- Avoidance(避免)
Require additional Apriori information
- Simplest and Most useful Mode
- Maximum number of resources
- Deadlock-Avoidance algorithm
- Resource-Allocation state to ensure that there can never be a circular-wait condition
- Resource-Allocation State
- the number of available and allocated resources
- the maximum demands of the processes
- Simplest and Most useful Mode
Safe state
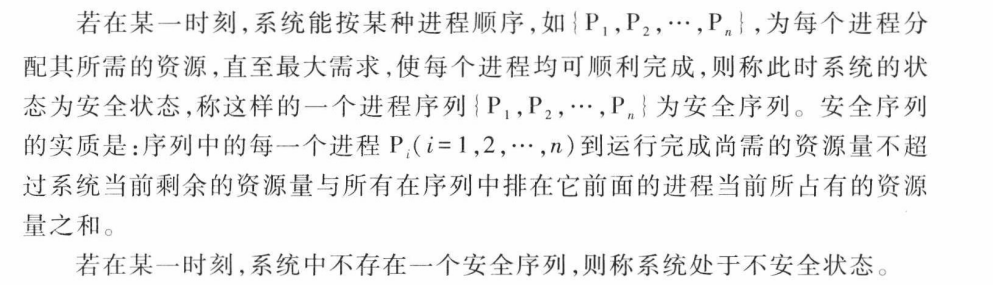
- When a process requests an available resource, must decide if immediate allocation leaves the system in a safe state
- System in safe sate → there exists a safe sequence of all processes
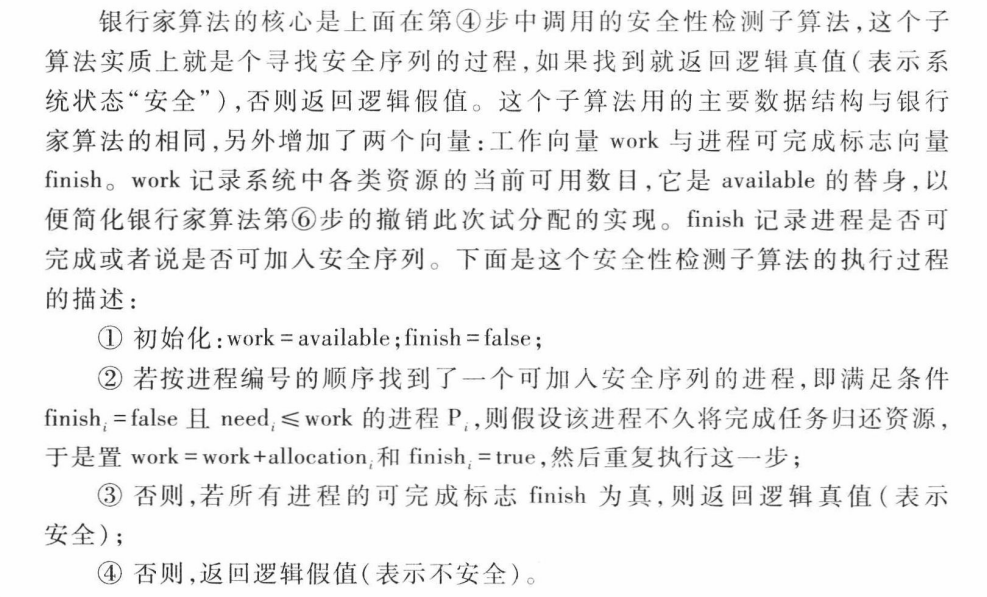
- Banker’s Algorithm
- Detection
- Allow deadlocks to occur but then rely on the operating system to detect the deadlock and deal with it
- Recovery
- Process Termination
- Resource Preemption
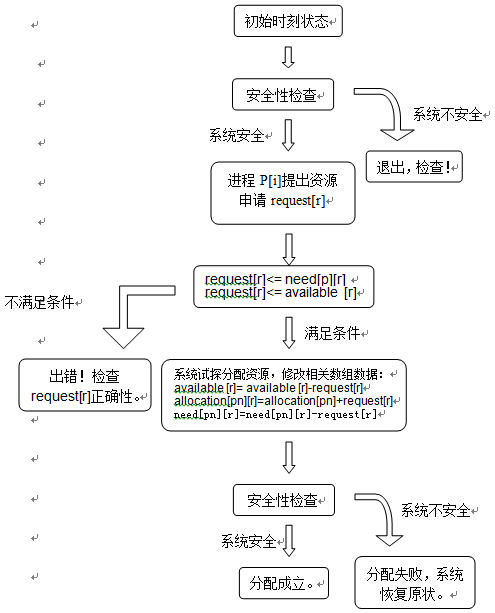
Bank Algorithm
银行家算法的实质就是要设法保证系统动态分配资源后不进入不安全状态,以避免可能产生的死锁。即没当进程提出资源请求且系统的资源能够满足该请求时,系统将判断满足此次资源请求后系统状态是否安全,如果判断结果为安全,则给该进程分配资源,否则不分配资源,申请资源的进程将阻塞。
银行家算法的执行有个前提条件,即要求进程预先提出自己的最大资源请求,并假设系统拥有固定的资源总量。下面介绍银行家算法所用的主要的数据结构。